1. 背景介绍
1.1 为什么需要vGPU?
在当下的AI/ML应用实践中,我们能明显感受到两股趋势的并行发展:
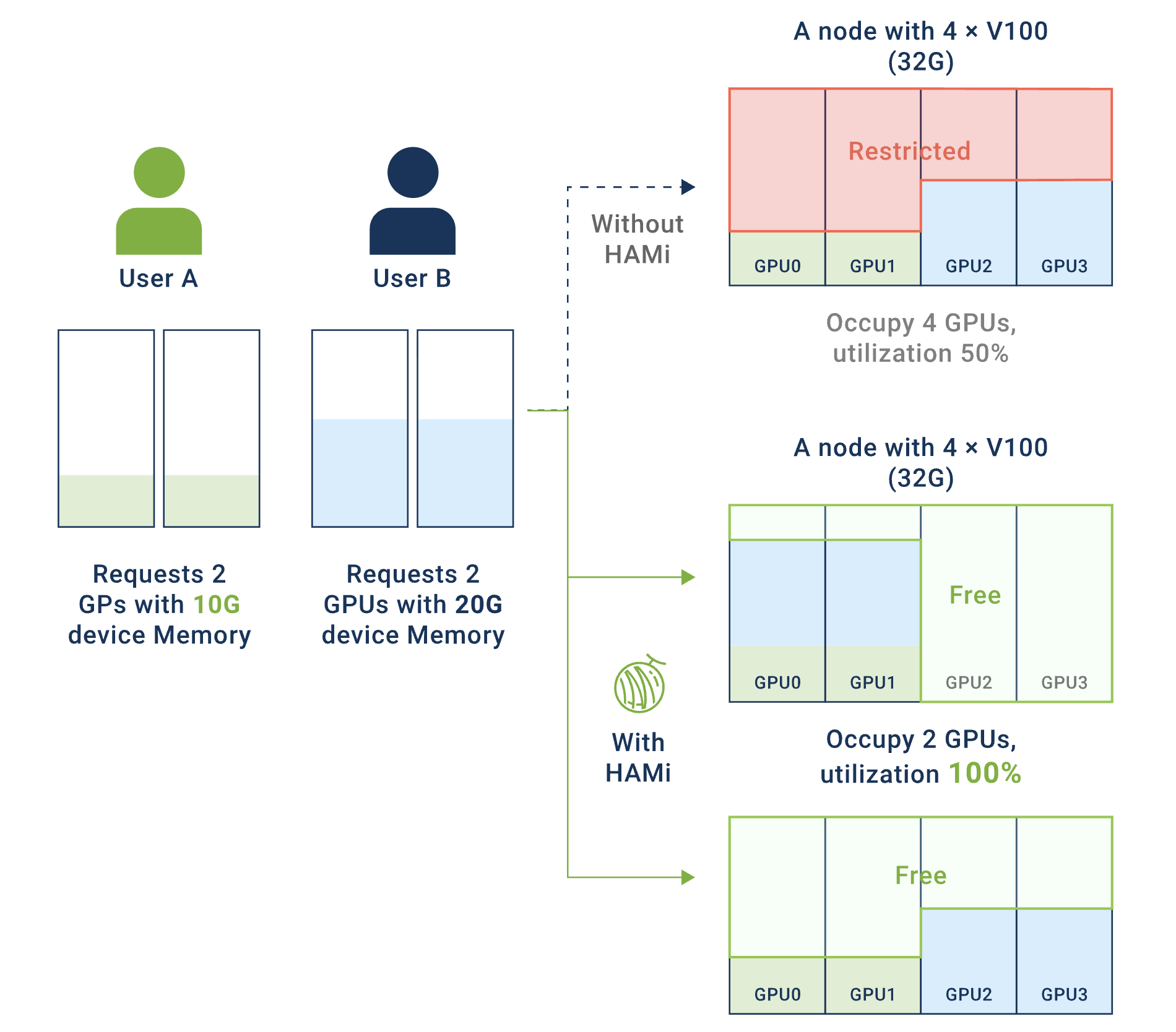
小模型推理场景:传统的小模型推理与部署方兴未艾,它们在推荐系统、实时预测、路径优化等业务中依然有着广阔的应用场景。然而,这类服务往往只需要2-4GB显存,却独占24GB的GPU卡,导致资源利用率低下,造成严重的资源浪费。
大模型部署场景:以大语言模型为代表的大模型部署正在快速兴起,对GPU多卡资源算力弹性的要求越来越高。在多租户环境下,缺乏有效的资源隔离机制,资源碎片化导致大任务无法调度。
这两个场景共同面临的核心问题是:如何在云原生环境下实现GPU资源的高效利用、精细化共享与隔离?
1.2 vGPU的核心价值
vGPU(虚拟GPU)技术通过将物理GPU虚拟化为多个逻辑GPU,具有以下优势:
-
资源利用率显著提升:通过将单张
GPU卡虚拟化为多个逻辑GPU,让多个小任务可以共享同一张物理GPU卡,大幅提高GPU的实际使用率,减少资源闲置。 -
成本优化:在相同的工作负载下,通过提高单卡利用率,可以减少所需的物理
GPU数量,从而降低硬件采购和运维成本。 -
灵活的资源管理:支持为每个任务精确分配显存和算力配额,实现细粒度的资源控制。可以根据业务需求动态调整资源分配策略,提高资源使用的灵活性。
-
多租户隔离保障:提供硬件级或软件级的资源隔离机制,确保不同租户或任务之间互不干扰。配合完善的配额管理和监控能力,为生产环境提供可靠的多租户支持。
2. 业界主流vGPU方案对比
2.1 方案分类
业界vGPU方案目前可划分为以下几类:
| 分类 | 代表方案 | 实现层次 | 开源情况 |
|---|---|---|---|
| NVIDIA官方方案 | MPS、MIG | 硬件 + 驱动层 | 闭源 |
| 用户态API劫持 | HAMi、NexusGPU | CUDA Runtime层 | 开源 |
| 内核态API劫持 | 阿里云cGPU、腾讯云qGPU | 内核驱动层 | 闭源 |
| 硬件虚拟化 | NVIDIA vGPU | 硬件虚拟化层 | 闭源商业 |
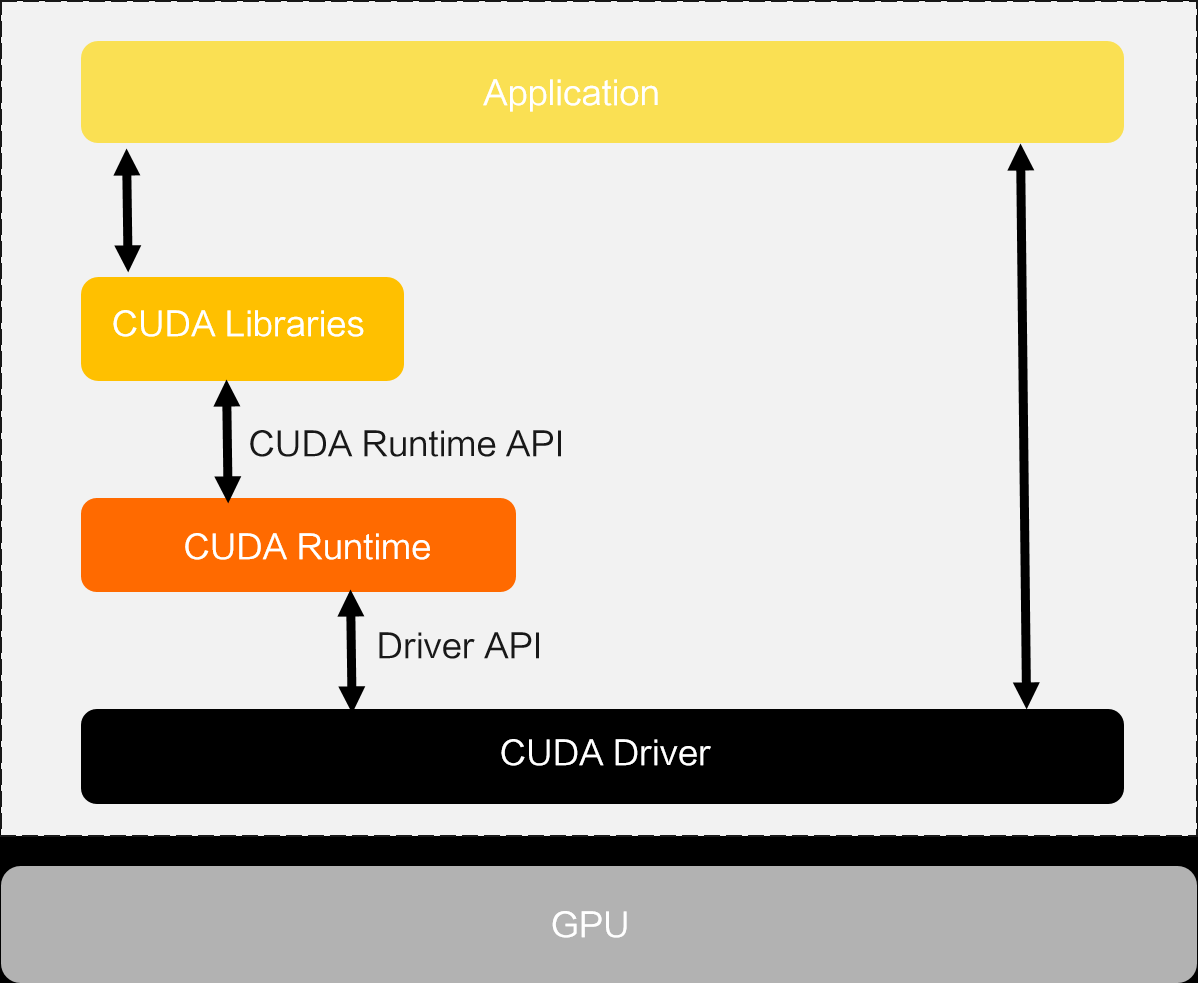
内核态API劫持相比较用户态API劫持实现vGPU来讲,其性能损耗会更小,约为5%,而用户态API劫持的性能损耗约10%。具体数据参考于互联网资料。
以下为应用与GPU通信大概的架构示意图,
其中,用户态API劫持工作在CUDA Runtime层,内核态API劫持工作在CUDA Driver层。
2.2 详细方案对比
说明:本方案对比不包含阿里云
cGPU、腾讯云qGPU等内核态API劫持方案,由于其数据不明,且存在一定的使用限制,不纳入考虑范围。
| 维度 | NVIDIA MPS | NVIDIA MIG | HAMi | NexusGPU |
|---|---|---|---|---|
| 隔离性 | ||||
| 显存隔离 | ❌ 无隔离 | ✅ 硬件隔离 | ✅ 软件硬隔离 | ✅ 软件硬隔离 |
| 算力隔离 | ⚠️ 软限制 | ✅ 硬件隔离 | ⚠️ 软限制 | ⚠️ 软限制 |
| 进程崩溃影响 | ❌ 影响所有 | ✅ 完全隔离 | ✅ 仅影响自身 | ✅ 仅影响自身 |
| 内存越界保护 | ❌ 无保护 | ✅ 硬件保护 | ✅ 有保护 | ✅ 有保护 |
| 性能 | ||||
| 性能开销 | ✅ 极低 | ⚠️ 有一定开销 | ⚠️ 有一定开销 | ⚠️ 有一定开销 |
| 上下文切换 | ✅ 快速 | ⚠️ 较慢 | ⚠️ 中等 | ⚠️ 中等 |
| 并发效率 | ✅ 高 | ⚠️ 中等 | ✅ 高 | ✅ 高 |
| 易用性 | ||||
| 部署复杂度 | ✅ 简单 | ⚠️ 需要配置 | ⚠️ 需安装组件 | ⚠️ 需安装组件 |
| 容器化支持 | ✅ 原生支持 | ✅ 原生支持 | ✅ 原生支持 | ✅ 原生支持 |
| 配置灵活性 | ❌ 有限 | ⚠️ 固定规格 | ✅ 非常灵活 | ✅ 非常灵活 |
| 监控可观测性 | ⚠️ 有限 | ✅ 完善 | ✅ 完善 | ✅ 完善 |
| 兼容性 | ||||
| GPU型号支持 | ✅ Volta+ | ⚠️ A100/H100+ | ✅ Pascal+ | ✅ Pascal+ |
| CUDA版本要求 | ✅ 无特殊要求 | ⚠️ 11.0+ | ⚠️ 特定版本 | ⚠️ 特定版本 |
| 应用兼容性 | ✅ 透明 | ✅ 透明 | ⚠️ 大部分兼容 | ⚠️ 大部分兼容 |
| 成本 | ||||
| 软件成本 | ✅ 免费 | ✅ 免费 | ✅ 开源免费 | ✅ 开源免费 |
| 硬件要求 | ✅ 无特殊要求 | ⚠️ 特定GPU | ✅ 无特殊要求 | ✅ 无特殊要求 |
| 维护成本 | ⚠️ 中等 | ✅ 低 | ✅ 低 | ✅ 低 |
| 其他 | ||||
| 开源情况 | ❌ 闭源 | ❌ 闭源 | ✅ 开源 | ✅ 开源 |
| 社区活跃度 | ⚠️ 官方支持 | ⚠️ 官方支持 | ✅ 活跃 | ⚠️ 一般 |
| 版权风险 | ✅ 无 | ✅ 无 | ✅ 无 | ✅ 无 |
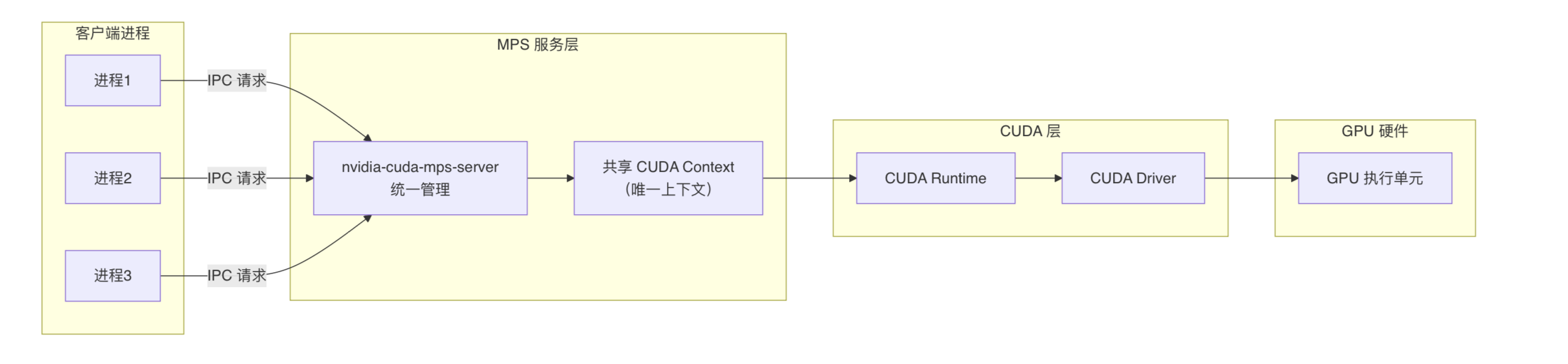
2.3 NVIDIA MPS的主要缺点
NVIDIA MPS的核心是在CUDA Runtime和CUDA Driver之上引入了MPS服务层,把多个进程的CUDA内核请求合并并下发给GPU,使得多个CUDA进程(或多个容器内的进程)能够共享GPU的SM(即算力部分),从而避免了CUDA Context频繁上下文切换,实现GPU利用率的提升。
但对显存分配上,每个进程仍然直接向CUDA Driver独立进行显存申请,不会被MPS统一调度。因此无法实现显存隔离。所有进程共享同一显存地址空间,任何进程OOM都可能导致整个GPU崩溃。
其主要缺点如下:
- 无显存隔离:无法限制单个进程的显存使用量,一个进程的显存溢出会导致其他进程失败。
- 进程崩溃连锁反应:单个进程的
CUDA错误会导致MPS Server失效,影响所有共享GPU的进程。 - 资源配额控制弱:无法精确限制显存和算力配额,环境变量设置仅为建议值而非强制限制。
- 监控困难:
nvidia-smi只能看到MPS Server进程,无法查看各客户端进程的实际资源使用情况。 - 故障定位困难:无法准确定位是哪个进程导致的错误,调试和性能分析工具支持有限。
适用场景:
- ✅ 适合:可信任的单一应用多进程、开发测试环境、对隔离性要求不高的场景。
- ❌ 不适合:多租户生产环境、关键业务推理服务、需要严格资源配额和故障隔离的场景。
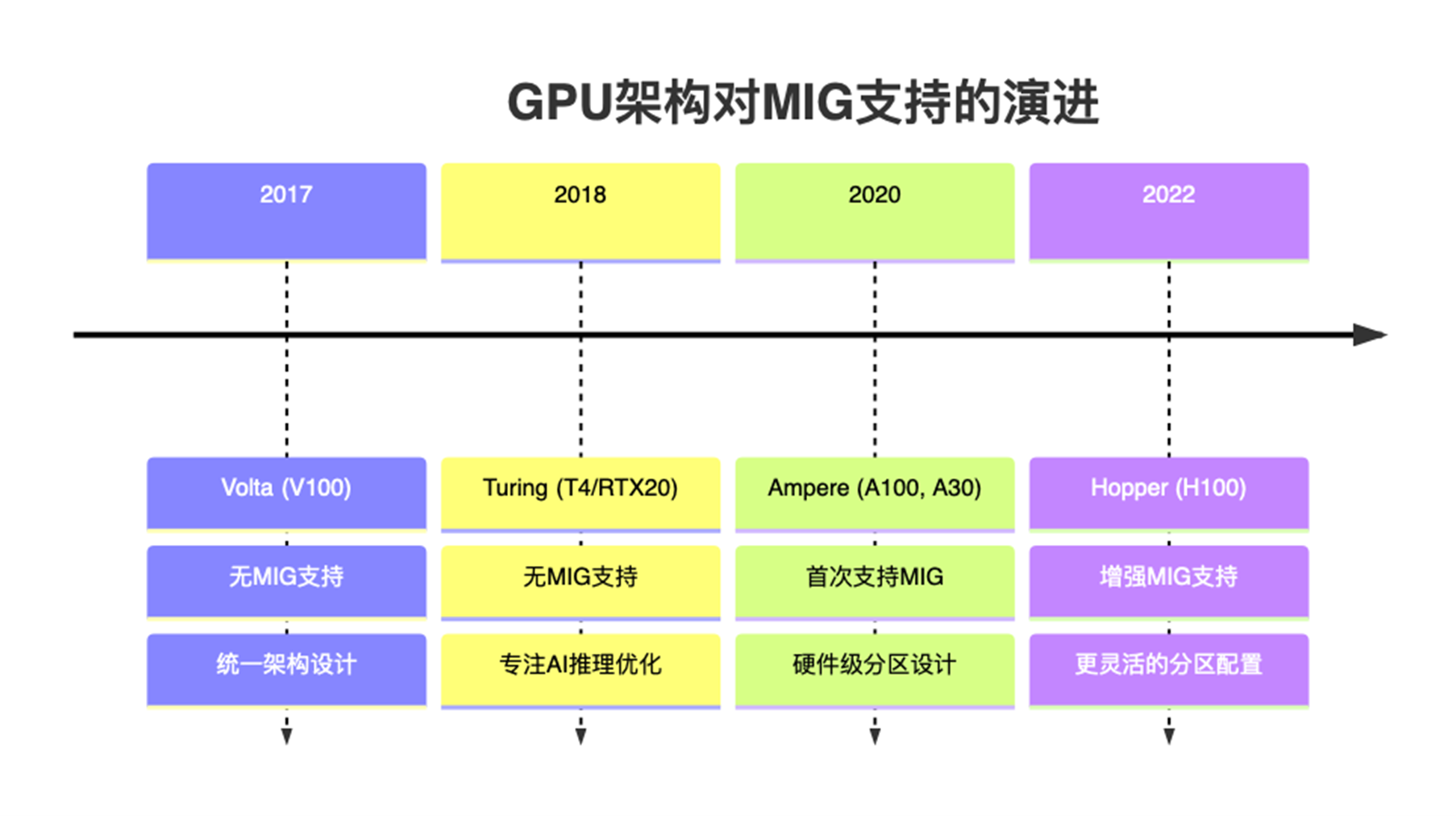
2.4 NVIDIA MIG的主要缺点
NVIDIA MIG是NVIDIA对A100、H100等新一代GPU提供的一种软硬件一体化的GPU/显存隔离技术。硬件层面,可以将SM + L2 Cache + 内存控制器 + IO 通道切割成多个独立MIG单元,每个单元就是一个独立的GPU实例,从应用和容器视角看就获得一张小GPU资源;从软件层面,在nvidia driver中增加了MIG driver,实现对支持隔离的硬件的调用,从而实现端到端的GPU虚拟化。
该方案在多租户场景下,虽然能够保证显存和算力的强隔离,但仅支持部分高端GPU(如A100/H100),对常见的T4、A10不适用。
其主要缺点如下:
- 硬件支持受限:仅支持
A100、H100等高端GPU型号,对于使用V100、T4等较早型号GPU的用户无法使用。 - 分区规格固定:
MIG实例的划分规格是预定义的(如1g.5gb、2g.10gb等),无法根据实际需求灵活调整显存和算力比例。 - 配置复杂度高:需要在
GPU驱动层面进行MIG模式配置,涉及GPU重启和实例创建,操作相对复杂。 - 资源利用率问题:由于分区规格固定,可能出现资源碎片化,例如剩余的小规格实例无法满足大任务需求。
- 动态调整困难:
MIG实例一旦创建,调整配置需要销毁重建,不支持在线动态调整资源分配。
适用场景:
- ✅ 适合:多租户生产环境、需要强隔离保障的场景、高端
GPU集群。 - ❌ 不适合:需要灵活资源配置的场景、使用非
A100/H100系列GPU的环境、频繁调整资源配额的场景。
3. HAMi开源项目调研
具体请参考:HAMi vGPU调研